
 대표어
대표어
 한국학술지인용색인(NRF)
한국학술지인용색인(NRF)





권호기사보기
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
결과 내 검색
동의어 포함
목차
6×6 이동로봇의 경로추종을 위한 동역학 시뮬레이션 / 허진욱 1
ABSTRACT 1
1. 머리말 1
2. 시뮬레이션 구성 2
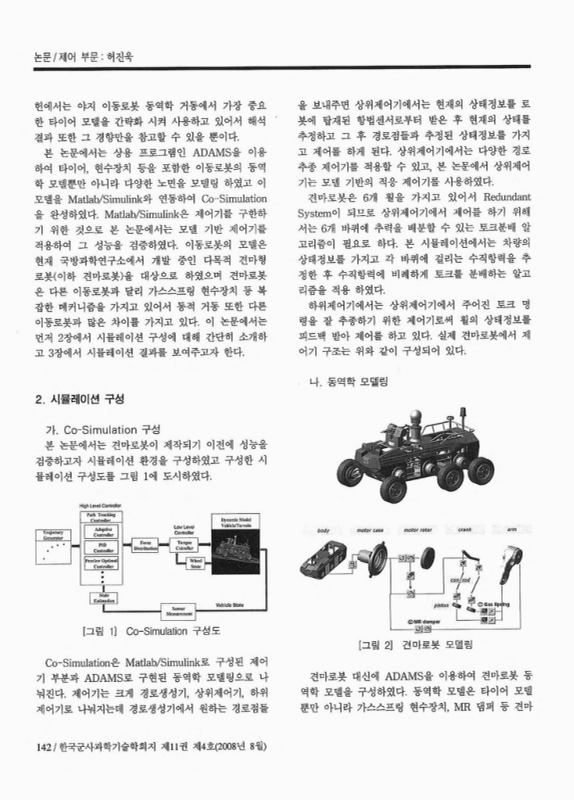
가. Co-Simulation 구성 2
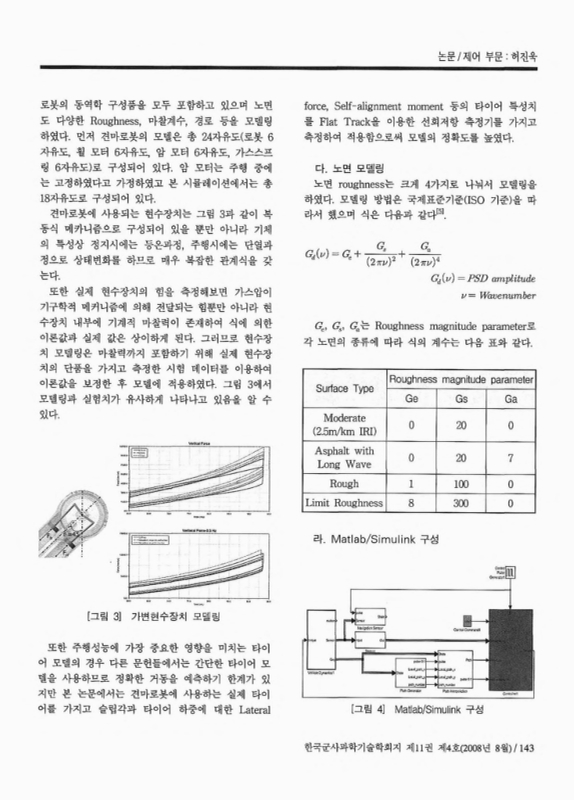
나. 동역학 모델링 2
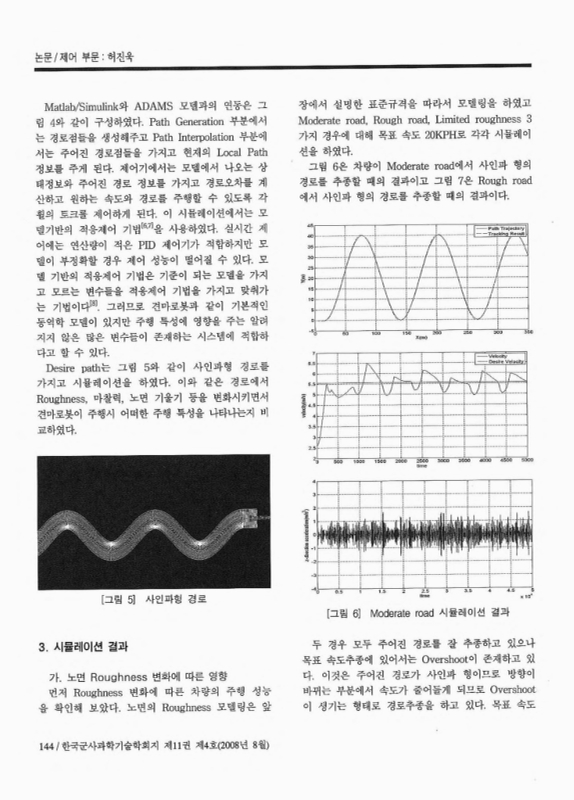
다. 노면 모델링 3
라. Matlab/Simulink 구성 3
3. 시뮬레이션 결과 4
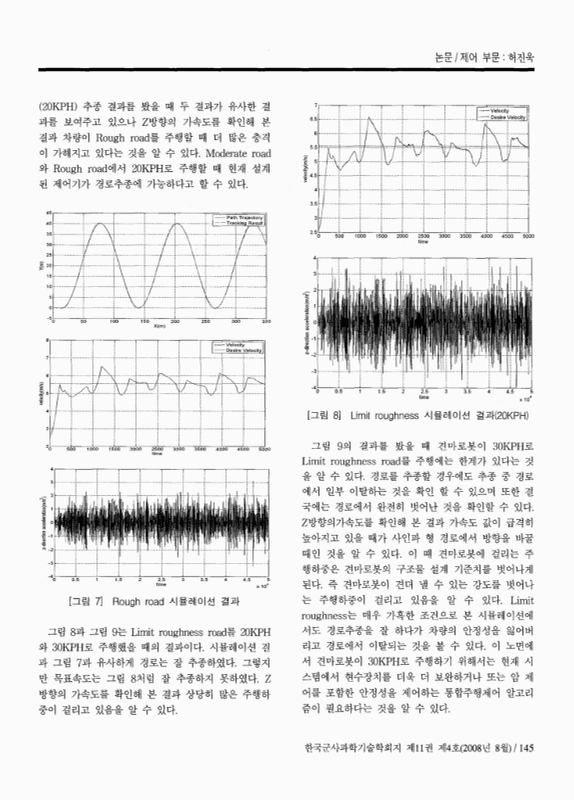
가. 노면 Roughness 변화에 따른 영향 4
나. 노면 마찰력 변화에 따른 영향 6
다. 횡경사 변화에 따른 영향 7
4. 향후계획 8
후기 8
참고문헌 8
| 번호 | 참고문헌 | 국회도서관 소장유무 |
|---|---|---|
| 1 | Trajectory Tracking Control of a Four-Wheel Differentially Driven Mobile Robot  |
미소장 |
| 2 | D. Pazderski, K. Kozlowski and W. E. Dixon, “Tracking and Regulation Control of a Skid Steering Vehicle”, Amer. Nuclear Soci, 10-th Int. Topical Meeting Robotics and Reomte Systems, pp. 369~376, 2004. | 미소장 |
| 3 | Modeling and control of a 4-wheel skid-steering mobile robot |
미소장 |
| 4 | A. Yunfeng, Z. Qunzhi, Z. Haitao, “A New Simulation Model for 4WS Vehicles based on Dynamic Tire Friction Model”, International Conference on Mechatronic and Embedded Systems and Applications, pp. 1~6, 2006. | 미소장 |
| 5 | T. D. Gillespie, “Fundamentals of Vehicle Dynamics”, pp. 126~132, Society of Automative Engineers, 1992. | 미소장 |
| 6 | 강정훈, 윤용산, 최세범, 임경빈, 허진욱, 강신천, “스키드 스티어 차량의 경로추종을 위한 모델기반 적응 제어기 설계”, 군사용 로봇 워크샵, 2007. | 미소장 |
| 7 | The design of a look-down feedback adaptive controller for the lateral control of front-wheel-steering autonomous highway vehicles |
미소장 |
| 8 | J. E. Slotine and W. Li, “Applied Nonlinear Control”, pp. 311~319, Prentice Hall, 1991. | 미소장 |
*표시는 필수 입력사항입니다.
| 전화번호 |
|---|
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
| 번호 | 발행일자 | 권호명 | 제본정보 | 자료실 | 원문 | 신청 페이지 |
|---|
도서위치안내: 정기간행물실(524호) / 서가번호: 국내12
2021년 이전 정기간행물은 온라인 신청(원문 구축 자료는 원문 이용)

우편복사 목록담기를 완료하였습니다.
*표시는 필수 입력사항입니다.
저장 되었습니다.
