
 대표어
대표어
권호기사보기
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
결과 내 검색
동의어 포함
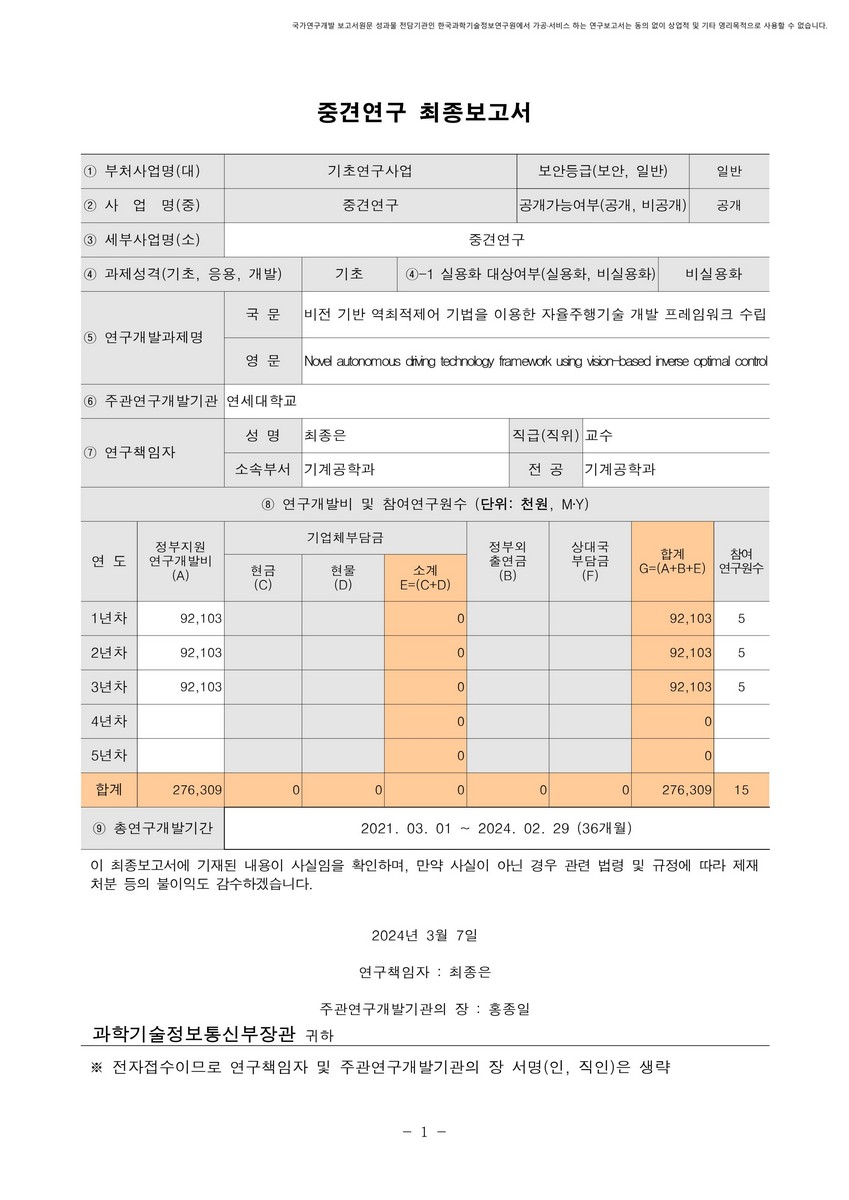
[표지]
연구결과 요약문
목차
1. 연구개발과제의 개요 4
1) 연구개발과제의 목표 4
2) 연구개발과제의 필요성 5
2. 연구개발과제의 수행 과정 및 수행 내용 6
1) 비전 기반 자율주행 상황인식 딥러닝 모델과 inverse optimal control의 융합 기반 마련 6
2) 비전 기반 자율주행 상황인식 딥러닝 모델 개발 7
3) 인간 운전자 비용함수 추정을 위한 역최적제어 기법 개발 7
3) 개발된 프레임워크를 다양한 자율주행 제어 문제 해결에 적용하여 확장성과 성능 검증 9
3. 연구개발과제의 수행 결과 및 목표 달성 수준 10
1) 정성적 연구개발성과(연구개발결과) 10
운전자별 전략이 있는 역최적제어 기반의 자율주행 시스템을 연구 및 개발 10
차량 시뮬레이터를 이용해 차량 dynamics 모델링 구현 10
차량 제어기 구현을 위한 시뮬레이터 환경 구성 및 Model predictive control 구현 11
Deep reinforcement learning을 이용한 MPC 비용함수 최적 스케줄링 기법 개발 11
시변화 Cost function을 가진 MPC 비용함수를 이용한 전문가 주행 모방 기법 개발 11
Differential Moving Horizon을 이용한 Vehicle Kinematics Estimation 13
2) 세부 정량적 연구개발성과 : [붙임1] 참조 13
3) 목표 달성 수준 13
4. 연구개발성과의 관련 분야에 대한 기여 정도(연구개발결과의 중요성) 13
자율 주행 관련 분야 연구 활성화 13
연구실의 기능 및 위상 14
자율주행차량 상용화에 기여 14
연구인력 양성 효과 14
지능정보 기술 분야 연구 활성화 14
패러다임 변화에 주도적인 입지 구축 14
5. 연구개발성과의 관리 및 활용 계획 14
6. 자체점검표 15
7. 참고문헌 15
붙임 17
1. 세부 정량적 연구개발성과 17
2-1. 연구책임자(해당 시 참여연구자(공동) 포함) 대표적 연구실적 22
2-2. 주관연구책임자(해당 시 참여연구자(공동) 포함) 대표적 논문·특허실적 요약문 24
*표시는 필수 입력사항입니다.
| 전화번호 |
|---|
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
| 번호 | 발행일자 | 권호명 | 제본정보 | 자료실 | 원문 | 신청 페이지 |
|---|
도서위치안내: / 서가번호:

우편복사 목록담기를 완료하였습니다.
*표시는 필수 입력사항입니다.
저장 되었습니다.
